

Build your own high-performance drone with the PIXHAWK 2.4.8 F450 Quadcopter Kit — a complete flight control and hardware bundle featuring a carbon fiber frame, 2212 920KV motors, BLHELI 30A ESCs, and customizable telemetry add-ons. Compatible with ArduPilot and PX4 firmware, this kit gives you full control over your UAV project.
The PIXHAWK 2.4.8 flight controller includes 14 PWM outputs, multiple UART, I2C, SPI, and CAN interfaces, along with integrated failsafe mechanisms and logging capabilities. Choose from several package configurations, including 433MHz, 915MHz telemetry, GPS, OLED displays, OSD modules, and more — making this the ultimate choice for students, hobbyists, and UAV developers.
| Component | Details |
|---|---|
| Flight Controller | PIXHAWK 2.4.8 – ARM Cortex M4, NuttX RTOS |
| Firmware | Supports ArduPilot and PX4 |
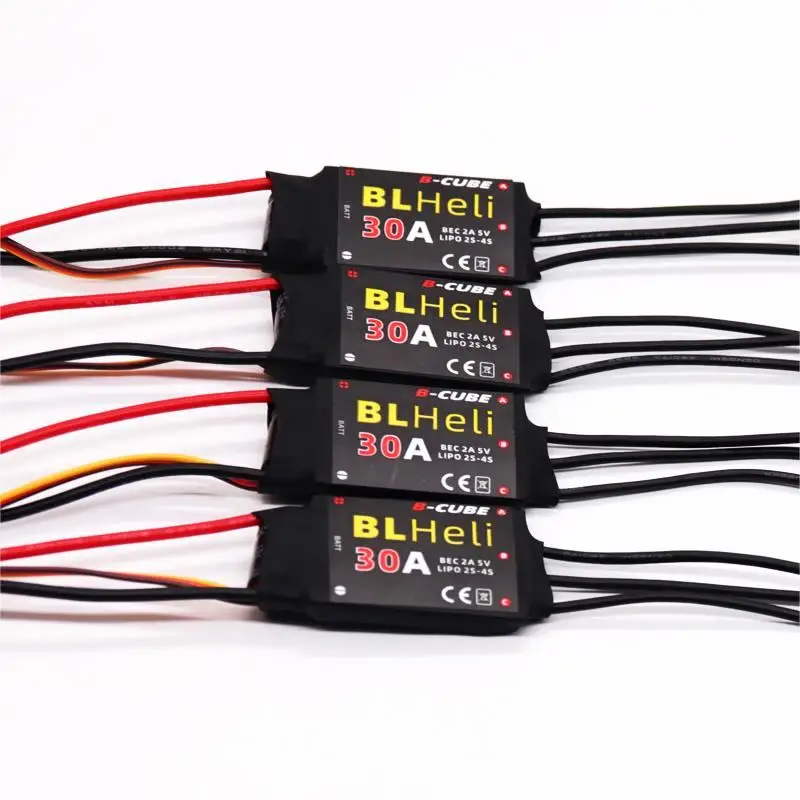
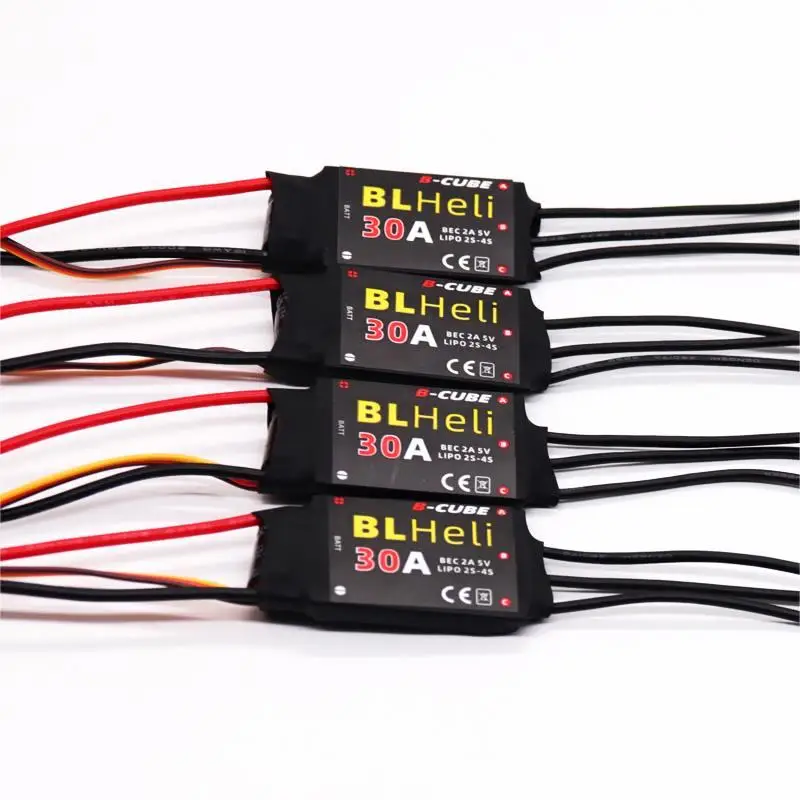
| ESCs | 30A BLHELI |
| Motors | 2212 920KV Brushless |
| Frame | Carbon Fiber F450 |
| Connectivity | UART, SPI, I2C, CAN, USB |
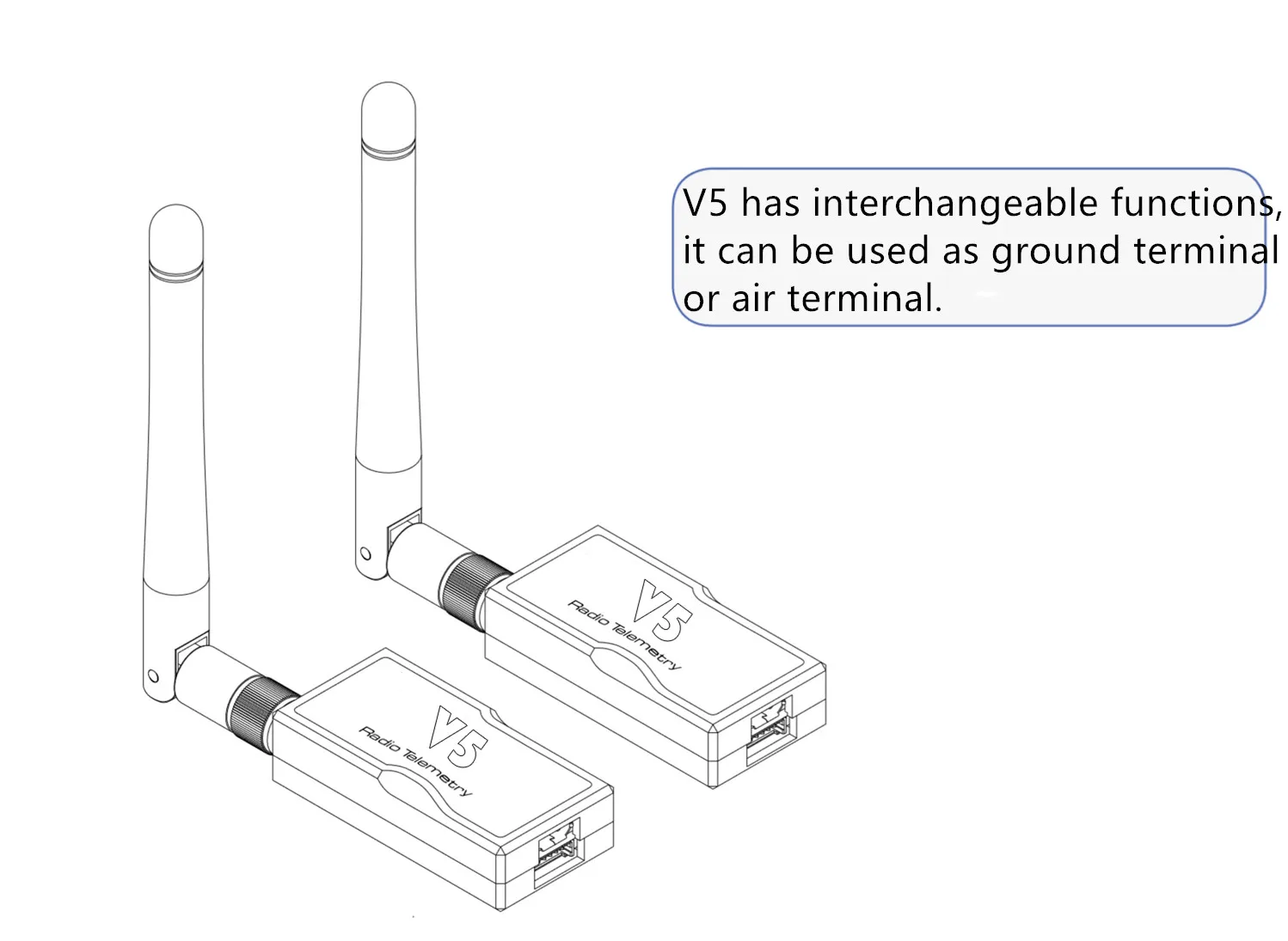
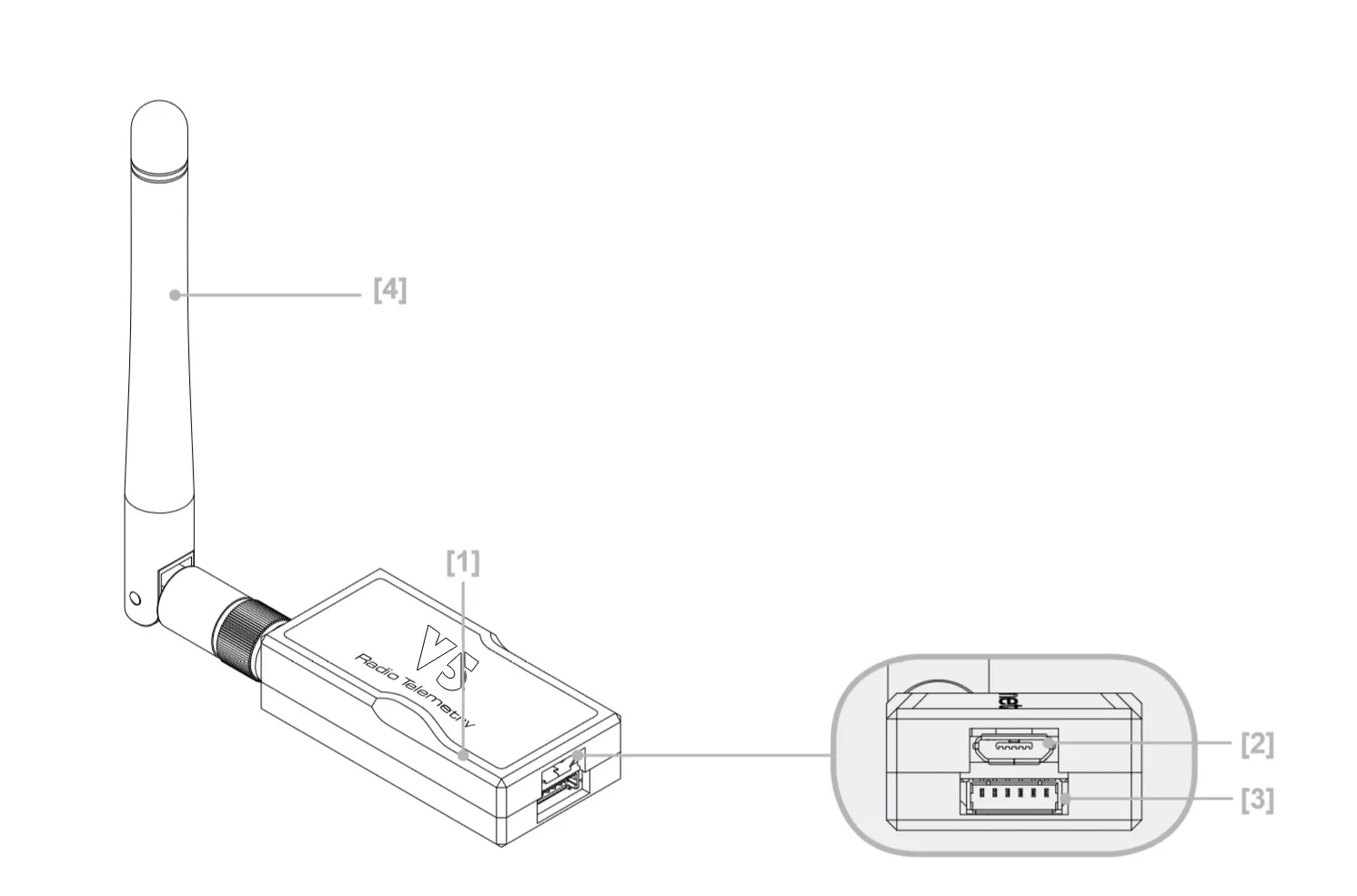
| Telemetry Options | 433MHz / 915MHz (100mW to 1000mW) |
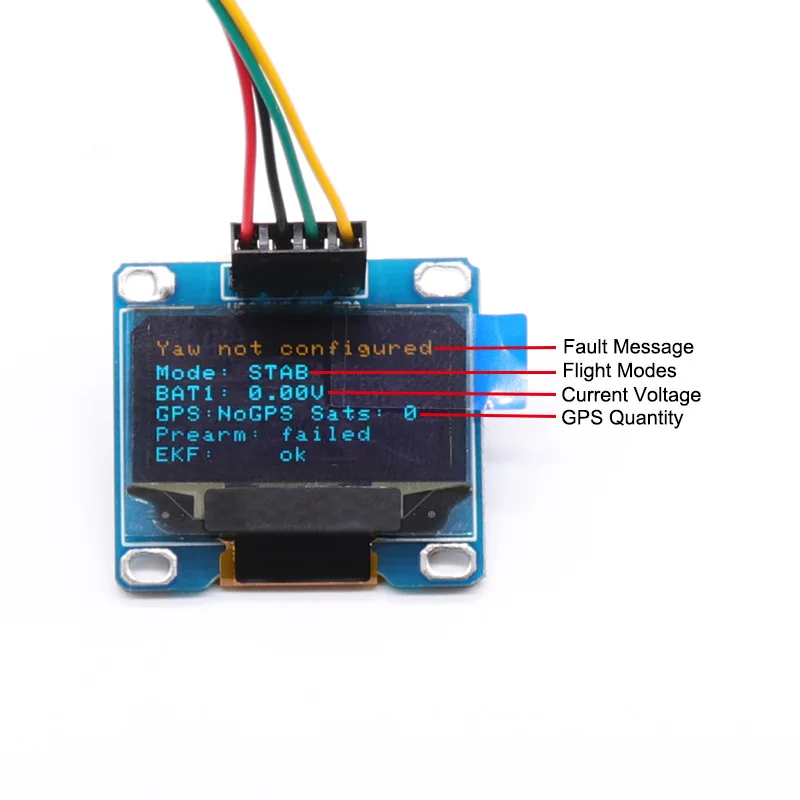
| Add-ons | OLED, RGB LED, GPS, OSD, VTX, Camera |




A.Features
A1: Use authentic electronic components to ensure high quality and enhance the current endurance ability of the ESC.
A2: Based on BLHeli firmware, optimized for high performance with great linearity and much quicker throttle response.
A3: Special designed for multirotors, and compatible with fixed-wing aircrafts and helicopters.
A4: Multiple protection features including Low-voltage cut-off protection / over-heat protection / throttle signal loss protection.
A5: Throttle range can be configured and is fully compatible with all receivers, providing smooth, linear and precise throttle response. A6: All parameters can be programmed via using a transmitter, including default settings.
B. Productspecification


1045 Propellers




VTX1000 is video transmitter,support 25MW-600MW,48 channel (with heat sink abd 3DBantenna )

FPV Camera

This article explains how to connect the ESCs, motors and propellers to a autopilot. The Pixhawk is used as an example but other autopilots are connected in a similar way.
Connect the power (+), ground (-), and signal (s) wires for each ESC to the autopilot’s main output pins by motor number. Find your frame type below to determine the assigned order of the motors.

Pixhawk Outputpins (numbered). First 4 pins are colour-coded for connecting a Quadframe
The diagrams below show motor order for each frame type. The numbers indicate which output pin from the autopilot shoould be connected to each motor/propeller. The propeller direction is shown in green (clockwise, CW) or blue (counter-clockwise, CCW)

Legend for motor-order diagrams


The diagrams above show two types of propellers: clockwise (called pushers) and counterclockwise (called pullers). The most reliable to recognize the correct propeller type by its shape as shown below. The thicker edge is the leading edge which moves in the direction of rotation. The trailing edge is more radical scalloped and usually thinner.
How to install Motor?

| Configuration | Standard Package, TOP Package, Simple Package, High Package, 433MHZ 1000MW C, 433MHZ 100MW A, 433MHZ 500MW B, 433MHZV5 1000MW, 433MHZV5 1000MW OSD, 915MHZ 100MW A, 915MHZ 500MW B, Simple Collocation, WIFI V2.0 C, WIFI V3.0 B, WIFI V3.0, WIFI V2.0 B, WIFI V3.0 C |
|---|
Only logged in customers who have purchased this product may leave a review.




Reviews
There are no reviews yet.